市集 最高价 最廉价 巨额价 江苏凌家塘市集发展有限公司 5.00 3.00 4.00 河南万邦海外农居品物流股份有限公司 7.00 4.00 5.50 长沙马...
阛阓 最高价 最廉价 巨额价 北京京丰岳各庄农副居品批发阛阓 24.00 20.00 22.00 北京顺鑫石门海外农居品批发阛阓集团有限公司北京分公司 27.0...
海格通讯晚间公告,公司全资子公司广东海格怡创科技有限公司(简称“海格怡创”)与广州市市政工程联想筹备总院有限公司构成的聚首体为广州市市政说念路合杆整治试点名堂(...
以色列在4月1日用好意思国飞机辐照6枚好意思国导弹攻击伊朗驻叙利亚大使馆那天就也曾注定好意思国在中国的主导权也曾被伊朗夺取了!伊朗也曾成为以色列开国以来第一个胜...
奥林匹克丛林公园蔷薇敞开,不如放下手中的悉力,来这片花海感受一下吧。...
|
2022年下半年,智驾行业脱手填塞一股去高精舆图的趋势;2023年,跟着彼时如故华为车BU CEO的余承东登高一呼,业内去高精舆图的呼声达到激越。时于当天,“无图NOA,天下齐能开”的宣传标语也曾成为车企们的通用词汇,高精舆图早已被东谈主们淡忘在边缘。 尤其这两年软硬件时刻的双向提高也让业内在“去高精舆图”上有了更多底气。 率先是收集模子索要特征智力提高。比拟于基于递次和小模子的智驾决策,智驾插足BEV+Transformer+OCC和端到端阶段,智驾决策的环境感知和指引预备智力齐得到提高; 其次,当今的智驾传感器决策至少采选6V+决策,比拟传统的单目决策领有更大的信息输入量,而且比多目后和会的精度更高,乌有更少,感知智力显着提高。 此外,端到端大模子的及时运行智力提高了系统服从,地平线征途6等高算力芯片不错提供更多的算力和算子补助。系统的承载和抒发智力更强了,也就无形中提高了它的上限智力。 这些齐加快了行业“去高精舆图”的法子。 
端到端带来的“假象” 端到端时刻到来让业内“去高精舆图”的底气达到激越。2023年,小鹏汽车率先建议“天下齐能开,有路就能开”的标语。随后,华为也赶快跟进,建议惟有有导航舆图的处所齐能开。今天,险些通盘头部车企在宣传标语上齐达成了“天下齐能开”。 2023年下半年,华为高阶智驾在乡间小谈丝滑穿行的小视频在收集疯传。彼时端到端智力也曾在施展作用,无图智驾智力得到落地考证。这也让车企们投诚,脱离高精舆图,智驾的推崇愈加驾轻就熟。 何小鹏致使激进地暗示,改日不上端到端和大模子的车企将会很快出局。《圆周智行》毛糙统计,终局当今,也曾有超过20+头部车企和智驾公司布局端到端决策。 
然则,端到端极高的上限智力险些“骗了”通盘东谈主,让寰球很容易冷落其下限也低的既定事实。 仔细分析会发现,事情并莫得名义看到的那么肤浅。自动驾驶时刻的实质是“输入信息的有用性+模子特征索要的高效性。” 前者由传感器数目和模态决定。端到端收集结构下,特征索要智力由熟所有据的质地和数据场景掩盖决定。但传感器及时探伤数据,具有探伤距离、分辨率、动态鸿沟等性能不休,及光照、拥挤、庇荫及信号丢失等场景不休。这就很难保阐述时感知信息的准确性。 智驾系妥洽般是先在云表离线熟悉模子,然后再下放到车端。但是在智驾车放量数据回传采纳场景前,离线模子学习到的齐是多量的成例数据,很是场景所需要的先验信息少。 若是要大宗量量产,又有不同城市递次及更多复杂场景的多量场景需要模子掩盖。 离线熟所有据,及时感知与复杂场景数据齐无法保证。这就使得端到端的上限提高的同期,下限也更低了。 而上文提到的无图智驾智力等于一个典型的“假象”。乡间小谈属于低速,小鸿沟,拓扑肤浅场景。这些场景下,OCC很容易构建出精准的3D语义空间,同期肤浅车谈及路网的轨迹瞻望更准确,加上被阻抑在局部小鸿沟,他车轨迹烦嚣小,旅途预备就相对肤浅。不仅如斯,低速进一步镌汰了系统延长,带来更好的旅途预备时空精度,有点像静态停车场景。看起来好像约束了无图带来的精度问题,一朝场景复杂度提高,速率提高,无图端到端的推崇就需要再行评估。 换言之,低速场景的推崇并不行当作车企脱离高精舆图能够达成更好智驾的佐证。 端到端需要行业再行评估智驾舆图的价值 喧闹之下,Momenta首创东谈主曹旭东,地平线首创东谈主余凯齐曾对行业发出过警惕,端到端上限高,但下限也低,尤其one model属于一体化端到端架构,属于典型的黑盒决策,具有不可讲解性,在安全上存在极大的时弊。 咱们先来看这么一个事实,即便在端到端时刻架构下,头部车企的智驾家具今天依然濒临许多问题,包括但不限于“收支环岛与推测变谈、环岛识别成丁字路口乌有减慢、中间车谈很是掉头、转弯时压线侵入非无邪车谈、掉头时道路弃取乌有侵入导流区插足对向车谈逆行、左转红灯未识别或无车谈级拓扑闯灯掉头、出梗直后多种类型谈路的汇出场景走错谈路”。 根蒂原因在于,这些场景齐是采选SD舆图与BEV感知和会来呈现谈路递次和拓扑联系,无法达成准确的感知推理。需要具随机空属性的先验信息赐与撑持,端到端无法依靠有限的离线熟悉智力推算出来这些东西。同期,这也需要模子具有极强的泛化智力,而模子熟悉主要受制于离线熟所有据的质地和漫衍无法达成这些驱散。 于是,朗歌科技副总司理李战斌得出这么一个论断,无图端到端时刻给车企带来的是一种过渡性上风,这种上风会在25年上半年消退。而要不绝提高用户的智驾体验,具有车谈级拓扑和属性的智驾舆图高质地数据会成为竞争症结。 解题的症结就在于智驾舆图,智驾舆图领有高质地的时空先验信息,通过embedding(镶嵌式)花样插足Transformer,增强端到端的感知瞻望智力。它不错向大模子输入实例化的场景辅导信息,感知得到舆图的时空实例化的贵重力增强,及时增强模子输出更为准确和全局最优的智驾规控信息。 智驾舆图不仅不错当作真值离线熟悉模子,也不错当作仿真舆图,生成4D熟悉样本,更不错当作前和会的时空先验常识,提高端到端的在线推明智力。智驾舆图当作先验常识输入Transformer后,通过embedding,舆图数据花样以Q,K,V输入到Cross attention(交叉贵重力),当作一种模态,通过attention来增强端到端自动驾驶的感知、规控及安全兜底收集或战略。 按照历史的训诫回溯,更能袒露地发现其中存在的问题。为了提高智驾体验,通盘行业阅历了两次大的算法升维。 第一次是从单目感知与多模块的递次化到分阶段的模子化,达成了训诫驱动到海量数据驱动的模子建立范式的变化,引入了多量的先验数据学习,及多目BEV与OCC的出现,及时感知信息量也增大;这个阶段概况是在2023年当年。肤浅说来,等于最早期的rule-based到其后的数据驱动。 接下来等于2023年开启的分段式模块化到渐进式端到端及双系统范式,系妥洽采选一体化模子,主要信息起原是BEV特征的时序化及anchor(锚点)实例的开动化输入,系统2更多的在于复杂场景的领航引导信息,比拟系妥洽的驱散显着收缩。系统1的信息丢失率减少,上限得到提高。两者齐需要及时推理,这又回到了上文提到的问题,感知信息不准确对推理驱散变成的影响。导致端到端的下限很低。 专门旨道理的是,两次时刻更变的发起者齐是特斯拉,然后国内车企赶快将这些时刻推向岑岭。 外界知谈双系统最早是理念念汽车上半年头度建议来,但从驱散上看,双系统加持下,理念念的智驾依然存在许多问题。 在通盘行业插足大算力芯片和端到端/世界模子的布景下,若是传感器输入的信息不及,那么欠定/非线性格况突显,无效解多量加多,导致端到端的下限很低,再增大芯片算力与模子复杂度是无效滥用。这时刻要作念的等于提高输入环境信息的有用性。智驾舆图等于不二之选。 然则,一个矛盾的问题摆在图商们眼前,传统智驾决策在使用舆图时需要将一一舆图元素通过递次建立的花样运用在旅途预备等模块中,而端到端最大的特质等于镌汰递次建立的诉求。 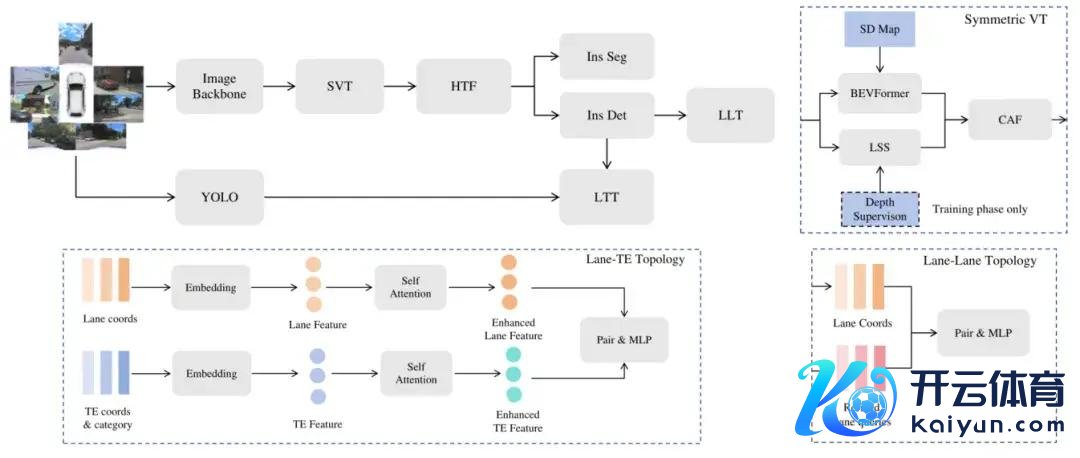
这里咱们来望望朗歌科技在实战中找到的训诫。本年6月,CVPR 2024国外自动驾驶挑战赛中,朗歌科技在无图智驾赛谈夺冠,打败来自10个国度和地区的120支军队,斩获创新奖和天下冠军奖。 传统基于递次和小模子的后和会花样在使用智驾舆图时存在感知和舆图两者分裂乌有或缺失机信谁的问题。而在端到端时期,智驾舆图不错以非监督信息镶嵌,当作query,或者key与value,这两种花样输入。 咱们先来看第一种,SD舆图特征当作key与value输入。举例朗歌参赛的LG-map多模态决策,在有 SD 舆图的场景下,LGMap 沿着 SD 中的每个矢量均匀采样固定数目的点,历程正弦位置编码之后,使用 BEVFormer 的花样,将 bev query 分裂对 SD 舆图特征和来自视觉输入的特征作念交叉贵重力。SD舆图特征当作key和value向量,通过交叉贵重力计较,和相机特征和会,得到最终的BEV特征。之是以这么编码,在于SD信息为谈路信息,清寒车谈级内容,当作检索信息来增强感知更为顺应。 第二种,智驾舆图特征当作开动化query输入。输入智驾轻舆图HQ,每个智驾舆图元素编码成一个query,即query的值开动化为舆图元素的几何位置和类别,与bev feature通过交叉贵重力收集来达成多模态信息的和会。这种“智驾舆图+智驾端到端前和会”输入花样能够带来几个显着的平正: 1、将舆图先验信息以非递次的模子化花样输入到收集结,与端到端模子镌汰递次建立的诉求一致; 2、基于舆图增强的query与BEV感知特征,端到端和渐进式端到端齐赢得先验常识的增强,提高模子下限和智驾用户体验; 3、更新后的query通过map decoder,输出前和会后的局部更新舆图,通过数据闭环回传,提高云表众包建图质地和服从,促进车云协同的周天智能体系飞轮的快速运转。 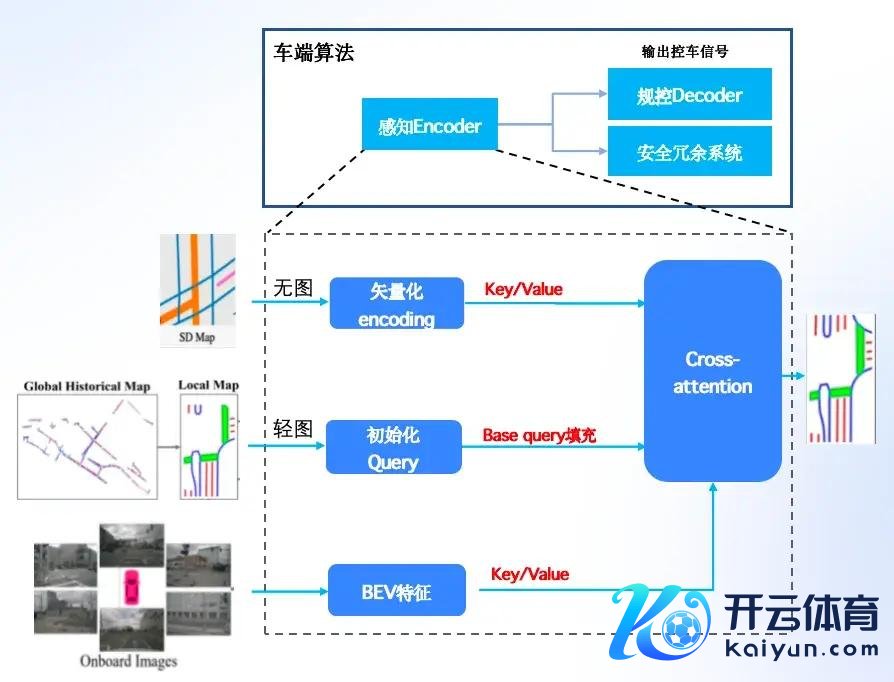
余凯和曹旭东齐有一个基本共鸣,城市NOA会在3-5年内迎来大限制爆发,端到端是一个很好的握手j9九游会真人游戏第一品牌,但要保证智驾的安全和体验有质的飞跃,行业需要再行评估智驾舆图的价值。 |